
這款車的智能駕駛系統怎么樣?
- 智能駕駛高速與城市表現區別:極氪智能駕駛系統深度評測-車家號
- 不吹不黑,樂道L60智駕一千公里使用體驗-有駕
- 吉利“千里浩瀚”安全高階智駕系統深度解析:技術革新與行業競爭力分析-知乎
- 理想L9首批用戶試駕報告,旗艦級智能駕駛系統深得人心-百家號
- 海豚智駕版千公里實測,車主說出實話-百家號
- 智駕技術戰:特斯拉、華為、理想、小鵬和比亞迪,誰才是未來-百家號
- 未來智駕之戰:特斯拉、華為等,誰能勝出-易車網
- 2025智駕排行榜出爐!三大王者車型PK,你的理想座駕是哪款-百家號
極氪智能駕駛系統深度評測
極氪作為智能電動汽車領域的佼佼者,其智能駕駛系統ZEEKR Pilot和浩瀚智駕2.0在高速與城市駕駛場景中展現了差異化優勢,同時通過技術創新與本土化適配,成為2025年智駕市場的標桿之一12。以下從技術架構、場景表現、安全冗余及用戶反饋四大維度展開分析。
一、技術架構:全棧自研與多傳感器融合
極氪智能駕駛系統采用“無圖+BEV+OCC”技術架構,擺脫對高精地圖的依賴,覆蓋全國99.99%道路場景2。硬件上,浩瀚智駕2.0搭載雙OrinX芯片(算力508TOPS)和31個感知硬件,包括11攝像頭、12超聲波雷達及9毫米波雷達,側向障礙物檢測能力較競品提升40%12。其核心算法通過100億公里智駕數據訓練,支持130km/h超高速自動剎停和懸空障礙物識別(如施工圍欄、低垂電纜)23。與特斯拉純視覺方案相比,極氪的多傳感器融合路線更適應中國復雜路況,尤其在極端天氣和加塞場景下表現穩健34。
二、高速駕駛:精準穩定與場景優化
在高速場景中,ZEEKR Pilot通過自適應巡航(ACC)和車道保持(LKA)實現長距離自主駕駛,車流量大時可自動調整車速并保持安全跟車距離1。用戶實測顯示,系統超車動作果斷,限速調整(如隧道降速)反應迅速,但匝道變道策略仍有優化空間——部分用戶反饋其會先切入快車道再迂回至右側,流暢性稍遜56。此外,系統對事故車輛識別精準(如翻轉車輛),但突發障礙物仍需人工干預,安全冗余設計符合L2+級標準17。
三、城市駕駛:復雜環境下的靈活應變
城市道路中,浩瀚智駕2.0憑借無圖化能力實現全場景領航。其“360°全姿態泊車”支持垂直、斜列及斷頭路車位,代客泊車范圍擴展至2公里,機械車位適配率達行業最高26。用戶反饋自動泊車功能尤其亮眼,可自定義不規則車位(如被柱子遮擋),30秒內完成泊入,新手司機體驗友好6。然而,面對“鬼探頭”等極端場景時,系統雖能快速剎停,但決策邏輯偏保守,需結合駕駛員觀察8。與華為ADS 3.0(識別率99.3%)相比,極氪在突發障礙物處理上仍有提升空間8。
四、安全與本土化:普惠策略與生態整合
極氪以“安全平權”為核心,將高速NOA+APA自動泊車下探至20萬元以下市場,如極越07(19.99萬元起)即支持無圖城市NOA,性價比顯著2。其自研芯片“龍鷹一號”占比50%,減少供應鏈依賴,算力利用率優于競品23。用戶評價中,系統哨兵模式、車道巡航等實用功能緩解了通勤疲勞,但部分用戶建議優化變道時機提示音強度以增強人機交互6。
總結:技術領先與體驗并重
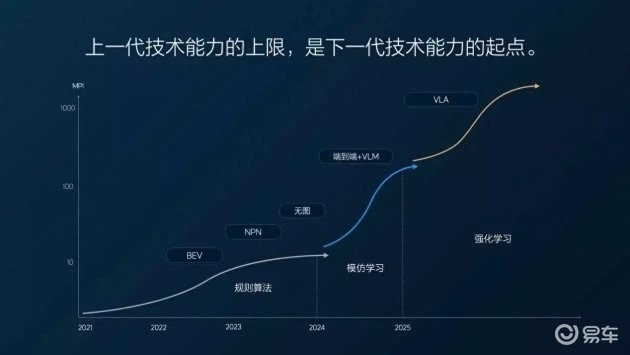
極氪智能駕駛系統在高速場景的穩定性和城市泊車靈活性上表現突出,硬件配置與算法訓練均屬行業第一梯隊12。然而,極端場景決策邏輯和交互細節仍有優化空間。若結合2025年智駕技術趨勢(如VLA大模型34),未來通過OTA升級進一步融合端到端算法,極氪有望在“無圖化”競賽中持續領跑。對于追求高性價比與全場景智駕的用戶,極氪當前版本已具備顯著競爭力。

智能駕駛高速與城市表現區別:極氪智能駕駛系統深度評測車家號

吉利“千里浩瀚”安全高階智駕系統深度解析:技術革新與行業競爭力分析硬派偏執狂

智駕技術戰:特斯拉、華為、理想、小鵬和比亞迪,誰才是未來車域無疆
未來智駕之戰:特斯拉、華為等,誰能勝出易車網
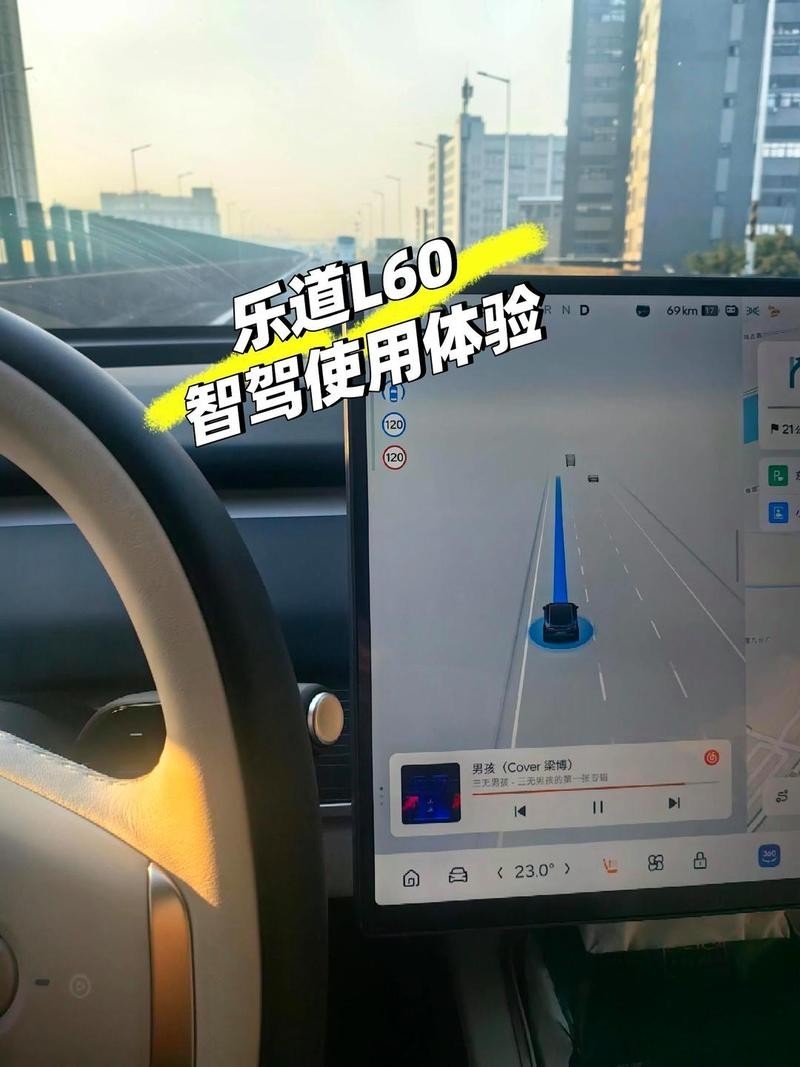
不吹不黑,樂道L60智駕一千公里使用體驗有駕

海豚智駕版千公里實測,車主說出實話戚跡汽車課堂

理想L9首批用戶試駕報告,旗艦級智能駕駛系統深得人心金融界

2025智駕排行榜出爐!三大王者車型PK,你的理想座駕是哪款車載冰箱的冷知識
推薦閱讀:
發表評論